Get your free personalized podcast brief
We scan new podcasts and send you the top 5 insights daily.
Robotic intelligence has two components. "Reasoning," which involves creating a plan, is quickly being solved by AI. The other, harder part is "movement"—the robot's physical dexterity to execute that plan reliably in a complex environment without tripping or failing.
Related Insights
Figure determined that coding robot movements is unscalable due to the infinite possible states (360^40). They pivoted from traditional C++ to Helix, an AI policy that controls the robot's entire body from camera inputs, treating robotics as a neural network problem, not a software engineering one.

Leading roboticist Ken Goldberg clarifies that while legged robots show immense progress in navigation, fine motor skills for tasks like tying shoelaces are far beyond current capabilities. This is due to challenges in sensing and handling deformable, unpredictable objects in the real world.

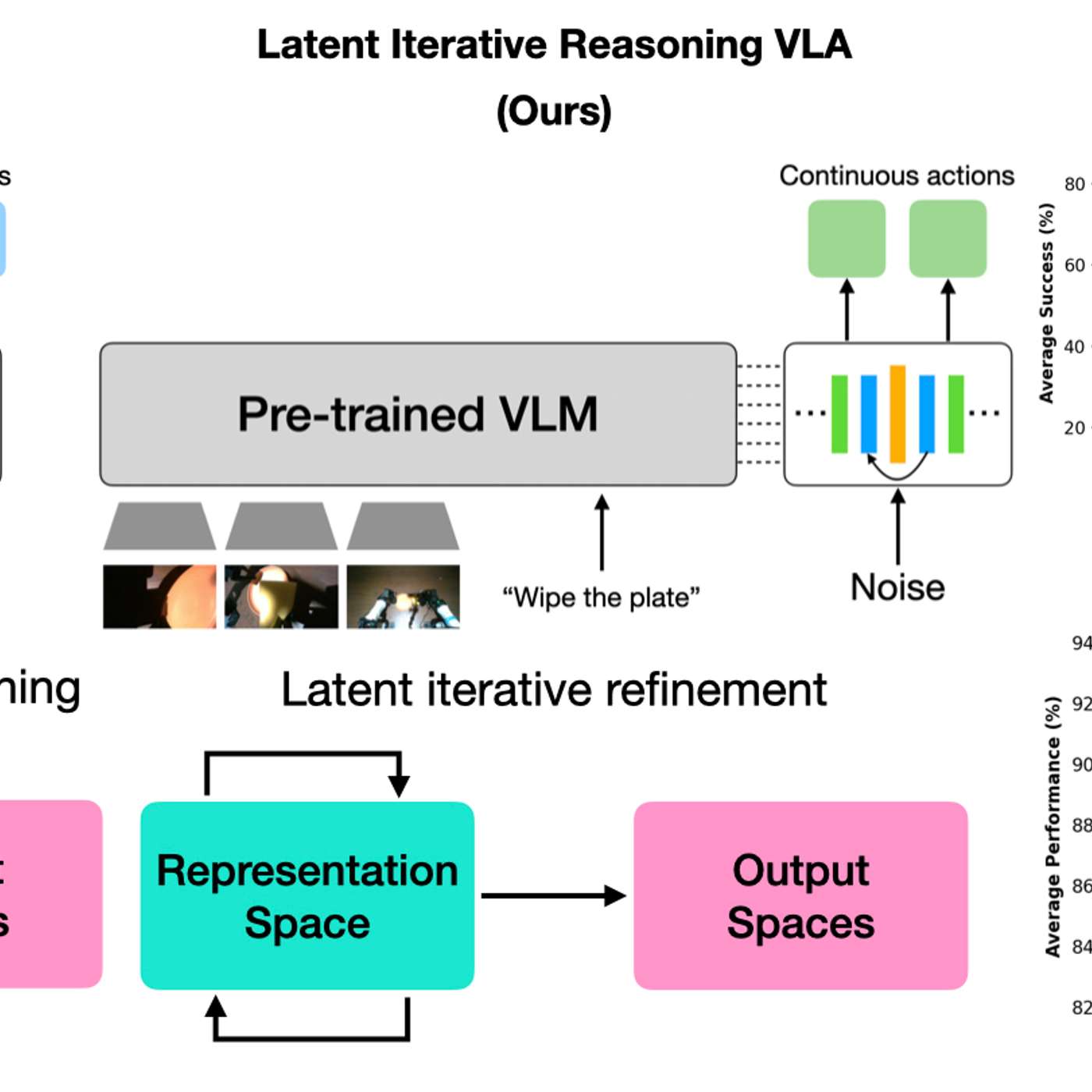
A new model architecture allows robots to vary their internal 'thinking' iterations at test time. This lets practitioners trade response speed for decision accuracy on a case-by-case basis, boosting performance on complex tasks without needing to retrain the model.
Ken Goldberg quantifies the challenge: the text data used to train LLMs would take a human 100,000 years to read. Equivalent data for robot manipulation (vision-to-control signals) doesn't exist online and must be generated from scratch, explaining the slower progress in physical AI.
According to Comma AI's CTO, the next frontier in robotics isn't just bigger models, but solving three fundamental challenges: 1) using ML for low-level controls, 2) making reinforcement learning (RL) practical for noisy environments, and 3) enabling continual, on-device learning to adapt to changing conditions.

Robots have become so capable at low-level physical tasks that the primary bottleneck has shifted to "mid-level reasoning"—interpreting a scene and choosing the correct next action. This means improvement can come from high-level language-based coaching, not just more physical demonstration data, which is a major breakthrough.
![Sergey Levine - Building LLMs for the Physical World - [Invest Like the Best, EP.465] thumbnail](https://megaphone.imgix.net/podcasts/fdcd4328-2c77-11f1-a72b-977309fd08f1/image/b1bb4368d6e13a4a804924681ffe3ab1.jpg?ixlib=rails-4.3.1&max-w=3000&max-h=3000&fit=crop&auto=format,compress)
Generalist CEO Pete Florence argues that dexterity—the ability for a robot to use its "hands" for complex manipulation—is the real holy grail of robotics. Solving challenges like wire harnessing, which is impossible for programmed robots, unlocks far more commercial value than simply creating humanoids that can walk.

Self-driving cars, a 20-year journey so far, are relatively simple robots: metal boxes on 2D surfaces designed *not* to touch things. General-purpose robots operate in complex 3D environments with the primary goal of *touching* and manipulating objects. This highlights the immense, often underestimated, physical and algorithmic challenges facing robotics.

Moving a robot from a lab demo to a commercial system reveals that AI is just one component. Success depends heavily on traditional engineering for sensor calibration, arm accuracy, system speed, and reliability. These unglamorous details are critical for performance in the real world.
Unlike older robots requiring precise maps and trajectory calculations, new robots use internet-scale common sense and learn motion by mimicking humans or simulations. This combination has “wiped the slate clean” for what is possible in the field.
