Get your free personalized podcast brief
We scan new podcasts and send you the top 5 insights daily.
Firms are deploying consumer robots not for immediate profit but as a data acquisition strategy. By selling hardware below cost, they collect vast amounts of real-world video and interaction data, which is the true asset used to train more advanced and capable AI models for future applications.
Related Insights
The rapid progress of many LLMs was possible because they could leverage the same massive public dataset: the internet. In robotics, no such public corpus of robot interaction data exists. This “data void” means progress is tied to a company's ability to generate its own proprietary data.

For consumer robotics, the biggest bottleneck is real-world data. By aggressively cutting costs to make robots affordable, companies can deploy more units faster. This generates a massive data advantage, creating a feedback loop that improves the product and widens the competitive moat.
Physical Intelligence demonstrated an emergent capability where its robotics model, after reaching a certain performance threshold, significantly improved by training on egocentric human video. This solves a major bottleneck by leveraging vast, existing video datasets instead of expensive, limited teleoperated data.

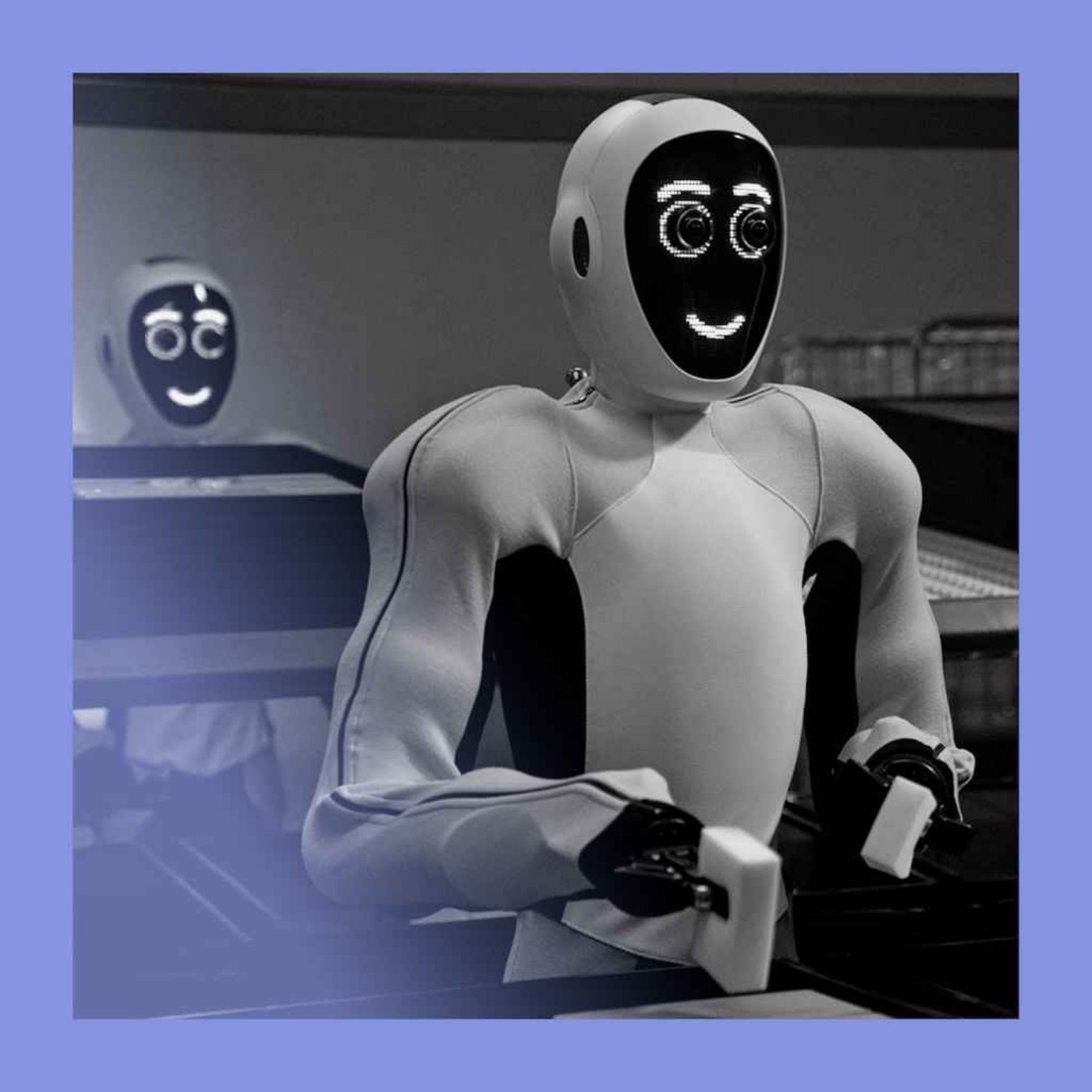
Companies developing humanoid robots, like One X, market a vision of autonomy but will initially ship a teleoperated product. This "human-in-the-loop" model allows them to enter the market and gather data while full autonomy is still in development.
The first home humanoid robot, Nio, requires frequent human remote intervention to function. The company frames this not as a flaw but a "social contract," where early adopters pay $20,000 to actively participate in the robot's AI training. This reframes a product's limitations into a co-development feature.
Progress in robotics for household tasks is limited by a scarcity of real-world training data, not mechanical engineering. Companies are now deploying capital-intensive "in-field" teams to collect multi-modal data from inside homes, capturing the complexity of mundane human activities to train more capable robots.

The future of valuable AI lies not in models trained on the abundant public internet, but in those built on scarce, proprietary data. For fields like robotics and biology, this data doesn't exist to be scraped; it must be actively created, making the data generation process itself the key competitive moat.
While Figure's CEO criticizes competitors for using human operators in robot videos, this 'wizard of oz' technique is a critical data-gathering and development stage. Just as early Waymo cars had human operators, teleoperation is how companies collect the training data needed for true autonomy.

The adoption of powerful AI architectures like transformers in robotics was bottlenecked by data quality, not algorithmic invention. Only after data collection methods improved to capture more dexterous, high-fidelity human actions did these advanced models become effective, reversing the typical 'algorithm-first' narrative of AI progress.

Companies like Character.ai aren't just building engaging products; they're creating social engineering mechanisms to extract vast amounts of human interaction data. This data is a critical resource, like a goldmine, used to train larger, more powerful models in the race toward AGI.
