Get your free personalized podcast brief
We scan new podcasts and send you the top 5 insights daily.
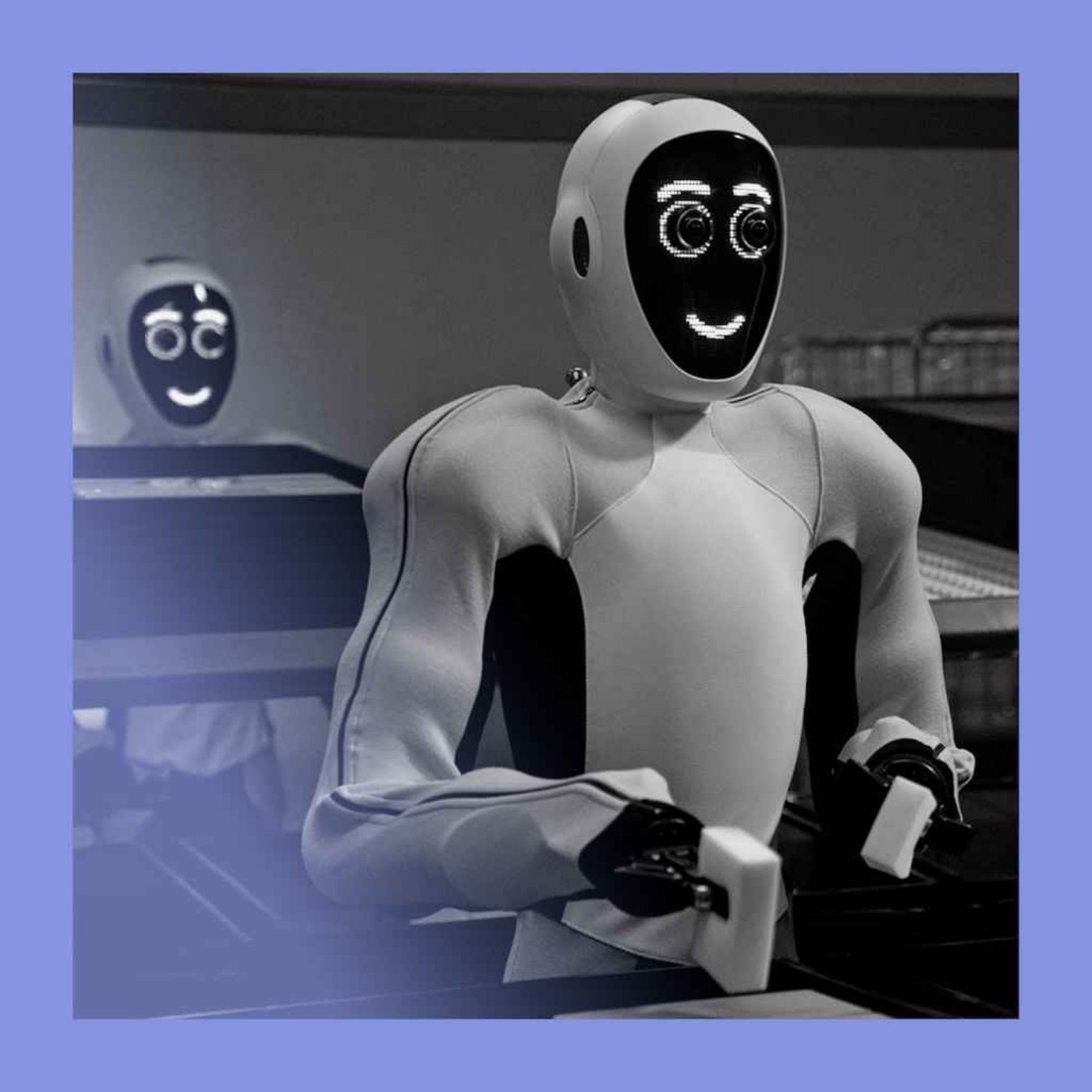
The humanoid robot industry is stalled by a data paradox: robots need vast amounts of real-world data from factory tasks to become useful, but they cannot be deployed in factories until they are already useful. This catch-22 forces companies to rely on simulated data, slowing the transition from entertainment props to industrial tools.

Related Insights
The primary challenge in robotics AI is the lack of real-world training data. To solve this, models are bootstrapped using a combination of learning from human lifestyle videos and extensive simulation environments. This creates a foundational model capable of initial deployment, which then generates a real-world data flywheel.
The rapid progress of many LLMs was possible because they could leverage the same massive public dataset: the internet. In robotics, no such public corpus of robot interaction data exists. This “data void” means progress is tied to a company's ability to generate its own proprietary data.

Unlike cars, which gather data passively, humanoid robots need active training. To solve this, Musk's strategy is to build a physical 'academy' of 10,000-30,000 Optimus robots performing self-play on various tasks, using this real-world data to close the 'sim-to-real' gap from millions of simulated robots.

Companies developing humanoid robots, like One X, market a vision of autonomy but will initially ship a teleoperated product. This "human-in-the-loop" model allows them to enter the market and gather data while full autonomy is still in development.
Progress in robotics for household tasks is limited by a scarcity of real-world training data, not mechanical engineering. Companies are now deploying capital-intensive "in-field" teams to collect multi-modal data from inside homes, capturing the complexity of mundane human activities to train more capable robots.

The current excitement for consumer humanoid robots mirrors the premature hype cycle of VR in the early 2010s. Robotics experts argue that practical, revenue-generating applications are not in the home but in specific industrial settings like warehouses and factories, where the technology is already commercially viable.

While Figure's CEO criticizes competitors for using human operators in robot videos, this 'wizard of oz' technique is a critical data-gathering and development stage. Just as early Waymo cars had human operators, teleoperation is how companies collect the training data needed for true autonomy.

Ken Goldberg quantifies the challenge: the text data used to train LLMs would take a human 100,000 years to read. Equivalent data for robot manipulation (vision-to-control signals) doesn't exist online and must be generated from scratch, explaining the slower progress in physical AI.

Brett Adcock states that Figure AI's "Helix 2" neural net provides the right technical stack for general robotics. The biggest remaining obstacle is not hardware but the immense data required to train the robot for a wide distribution of tasks. The company plans to spend nine figures on data acquisition in 2026 to solve this.
Firms are deploying consumer robots not for immediate profit but as a data acquisition strategy. By selling hardware below cost, they collect vast amounts of real-world video and interaction data, which is the true asset used to train more advanced and capable AI models for future applications.